今天来介绍一个自动控制上常用的一个调节电路:PI调节电路,也就是比例积分电路。当然作为PID调节电路,会有很多种形式,这可是最简单的由单运放构成的PI电路。你也可以通过三个运放来构成,U2构成积分器,U1做比例运算,U3构成加法器。如图1:
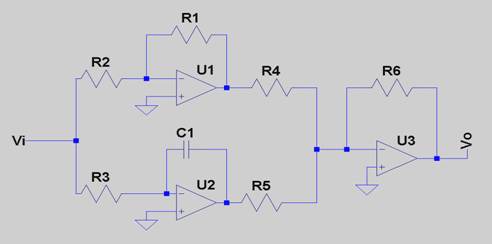
图 1
上面的比较好理解,这里就不讨论了。我们来研究下面的PI电路。如何来读懂这个电路呢,似乎与图1差别很大,好下面来计算一下传递函数
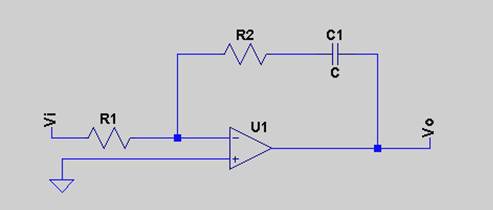
图 2
如图2 箭头表示电流的方向,取电压与电流关联参考方向。根据运放“虚短“可知运放反向输入端基本保持零电位。则
I=Vi÷R1-------------------------(1)
由“虚断断”可得I直接流过R2 C1路径,Ur2 Uc1 分别表示R2 C1上的压降
则 Ur2=I×R2可得Ur2= Vi×(R2÷R1)---(2)
由1/C1×(dUc1/dt)=I两边积分可得
1/C×∫I=Uc1=>1/C1×∫(Vi÷R1)dt--------(3)
综合2 3两式的,我们就可以华丽的得出以下
Vo=-Vi×R2/R1-1/C1×∫(Vi÷R1)dt 稍微整理一下可以看到更清楚一点
Vo=﹣(R2/R1) ×Vi-1/( C1×R1) ×∫Vidt------—(4)
令Kp=﹣(R2/R1) Ki=-1/( C1×R1)
Vo=Kp×Vi+Ki×∫Vidt 这其实就是个PI调节的标准表达式。
Vo通过某种方式去控制外设,常用方法如三角波比较进行脉宽调试。
我们再对上面的图进行简单的变形得到下图

图 3
采用上面的计算方法可以很方便的计算出输出表达式
其中 I=(Vi/R1+Vref/R3)
在实际系统中Vi作为实际采集的目标值 Vref就是设定的目标值。在设计的时候一般将Vref设置为对应的负值,以构成负反馈。如目标值是5V,就将Vref设定为-5V.再将R3的值取的后R1一样。则I=(VI-Vref)/R1 I=Ve/R1. 这图三可直接变换为图 2,只需将Vi 变为Ve
将4式中的VI替换为Ve
Vo=﹣(R2/R1) ×Ve-1/( C1×R1) ×∫Vedt------(5)
适当调节R1 R2 C1 就可以设定PID参数
在看看下图据说也是有人用的, 但是我没有用过,我就是推算下
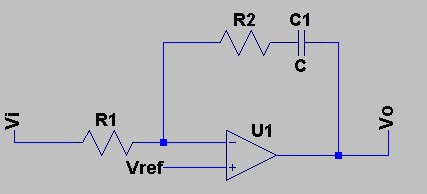
图 4
通过和上面同样的方法 Ve=Vi-Vref;
Vo=Vref﹣(R2/R1) ×Ve-1/( C1×R1) ×∫Vedt------(5)
(5)式与(4)式相比多了个直流分量 Vref.。如果后级电路配合合适,应该也是可以实现反馈调节的。
|
















 楼主
楼主

 标题置顶
标题置顶 标题高亮
标题高亮

























我想采用图2中的电路代替PI模块,但是差了个负号,这该怎么应用